
从视频,我们可以证明皇家不丹航空用的并不是花哨高级的RNAV进近,而是最传统的VOR进近的破云程序。12500是决断高速,如果突破了这个高度,还没有看见跑道,那么执行复飞程序。
如果12500看见了跑道,那么继续自动驾驶下降到11500。
无论你是采用减重,还是换成更小的飞机,请确保你的空速低于140节,理想状态是低于135节。因为越大空速,你需要更大的转弯半径,以及更大的机动,包括更短的时间完成动作。关键的关键。
这里是高高原环境,你的实际地速已经将近160节,所以140节,不能再快了。再快你会很麻烦。
起落架,襟翼全放,都是为了更低的空速。
11500之后,正式的表演开始。
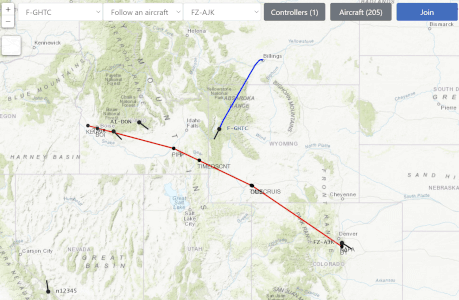
从平面轨迹图,我们可以看见整个流程并不是一直在转弯,一开始的沿着山脊的直线,接着圆弧右转。沿着山腰直线,到最后的S型对准跑道。中间是有喘息的机会的。
我研究flying Dragon的视频好几个月了,再结合网络上各大论坛的一些谣传。
我总结分成5个阶段。

第一阶段,沿着山脊,几乎直线飞行,你可以做横滚微调,对准,滑滑梯山脊,目标高度10000~11000。这里并不需要大下降率,稳定心情,做好准备。山脊上有几户人家,你会路过这几户人家。
第二阶段,在和滑滑梯山脊交汇之后,开始大机动,右横滚20~30度,我实际测试发现20度足够了,同时保持下降,下降率在700~1000FPM,这里的轨迹会是一个右转圆弧,眼睛对准对面的山腰,所以记得调整自己的视角。你该阶段最后越靠近山体,你最后的S型转弯,会越容易。该阶段下降的目标高度在9000~9500英尺左右。你会发现,这个高度,你正好到达山腰的高度。要点是贴近山体。
另外一个看点是,这个山体有个凹槽。
这个阶段要多说两句,仪表之王是姿态仪,不是下降率,所以你要追逐的是横滚角度比如20度,和机头仰俯角度比如-5度。千万不要去追下降率,由于下降率的延迟特性,你会飞出波浪形,起伏轨迹。下降率只是作为扫一眼的参考。这些是飞行基础,我再强调一下。
第三阶段,从左侧是山腰的位置开始,几乎是直线飞行,沿着左侧一路的山腰继续下行。很多人认为是沿着河谷飞行,其实并不是不丹皇家航空的真实情况,他们是沿着山腰飞行。此时你的眼前应该能看见前方偏右的红色大寺庙,这个标志性建筑。但是你的瞄准点并不是寺庙。你的眼睛应该看着山腰的尽头。第三阶段中,你会有一个时刻,发现自己的航行轨迹,和右侧的跑道15平行。此时你有一种冲动想右转了。但是可惜的告诉你,你还需要再憋一会儿,还没到右转的那一刻。直到几乎无山腰可以依靠,就是右转的开始
第四阶段,一个右横滚20度,然后直线瞄准右侧这个山腰上的房子,你的目标是右侧机翼几乎和这个房子平行的高度,记着尽量靠近这个房子,为下一阶段转弯做准备。你越靠近房子,下阶段的转弯空间越大。右转之后,你其实是飞的直线,对准房子的,这个阶段,你可以定定神,深呼吸,是有机会的。
第五阶段,是我遇到出问题最多的阶段。一个大坡度左横滚,对准跑道,同时落地到跑道入口。这个阶段落地轻不是最重要的,而是落地的位置最重要,帕罗跑道长度很有限,千万不要飘到跑道中场才落地,你落的再轻盈,也会没时间停下来,而最终冲出跑道。这个阶段,我是飞了四个降落之后,才找到感觉。多练习才会有感觉,没有太多技巧可言。对我个人而言,这个阶段难度最高,而且跑道出现在眼前的冲击感,会让你有点怂。
【国内我就没见过一个把帕罗跑道15降落飞对的【大叔带你:开飞机】】 https://www.bilibili.com/video/BV1q3411U7eU/?share_source=copy_web&vd_source=0948e3a98c0b89ddc6bb52f6ec0f82b9




















+1-750988.jpg)
+1-794046.jpg)
+2-795004.jpg)
+1-744282.jpg)